Rólunk
Támogatóink
Partnereink
Médiaajánlat
Elérhetőségek
Fogalomtár
ÖKO-DRIVE
Érdekességek
Környezetvédelem
Megújuló energiaforrások
Zöld építészet
Technika
×
Környezetvédelem
Raisz Anikó: folytatódik a Kölcsönkapott levegő program
2024.04.25. - 10:34
Környezetvédelem
Napelemek: egyszerűsödött az energiatárolás egy új fejlesztéssel
2024.04.25. - 05:38
Környezetvédelem
Navracsics Tibor: apró lépésekkel, tájazonos módon érdemes a természeti környezetben fejleszteni
2024.04.24. - 18:09
Környezetvédelem
Koncz Zsófia: rekordszámú jelentkező regisztrált az idei TeSzedd! hulladékgyűjtési akcióra
Környezetvédelem
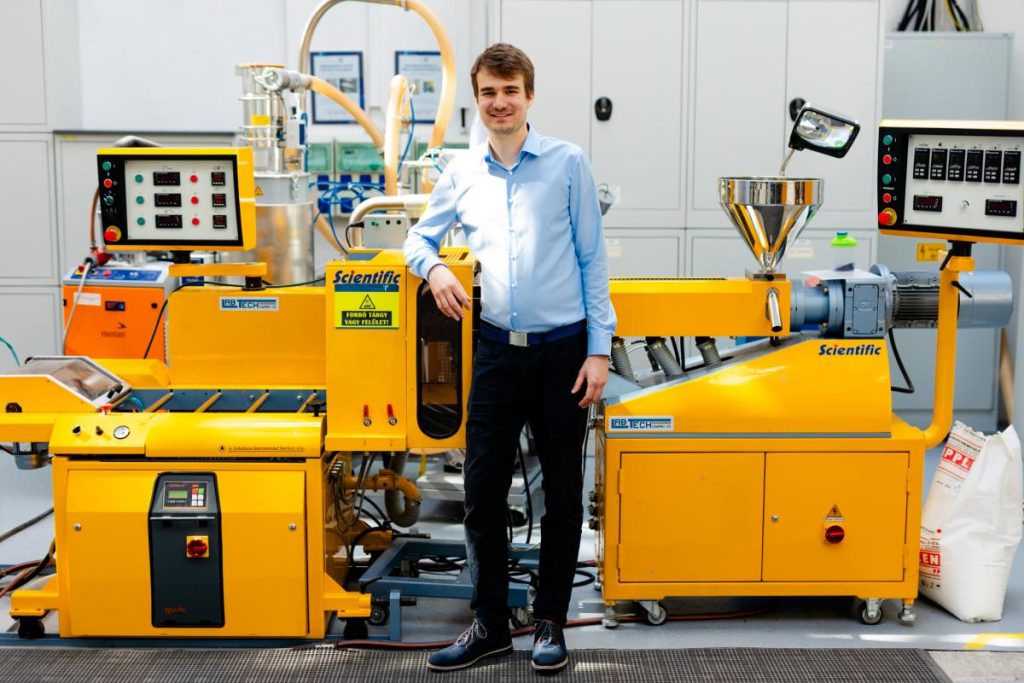
A vegyes műanyag palackhulladék kezelésére is van megoldás
Környezetvédelem
MEKH: tovább erősödik a nagykereskedelmi energiapiacok felügyelete
Újdonságok
Környezetvédelem
Energiaügyi Minisztérium: korlátozó intézkedések nélkül is csökkent a gázfogyasztás a fűtési szezonban
2024.04.23. - 14:04
Környezetvédelem
AM: a fásítás az egyik legjobb eszköz a klímaváltozás ellen
2024.04.23. - 12:34
Környezetvédelem
A veszélyeztetett brazilfenyőket bemutató tárlat nyílik hétfőn a FSZEK Központi Könyvtárában
2024.04.23. - 11:34
Környezetvédelem
MME: ne vigyük haza a madárfiókákat és más állatkölyköket!
2024.04.23. - 10:34
Környezetvédelem
Döntöttek Brüsszelben: kötelezővé teszik a napelemeket az épületekre
2024.04.23. - 05:33
Környezetvédelem
Az Alteo 200 forint alaposztalék mellett 200 forint rendkívüli osztalékot fizet
2024.04.22. - 19:46
Kövess minket
ÖKO-DRIVE
EM: Magyarországon nőtt a második legnagyobb arányban a tisztán elektromos autók értékesítése márciusban
2024.04.21. - 18:09
Ásványolaj szövetség: 1,9 százalékkal csökkent az üzemanyagfogyasztás az első negyedévben
2024.04.21. - 17:08
Kevesebb új autót helyeztek forgalomba múlt hónapban
2024.04.21. - 12:34
Rekordmagas szinten a csehországi személyautó-gyártás
2024.04.20. - 10:34
ÉRDEKESSÉGEK
Hungexpo: csaknem 30 ezer látogató kereste fel a Utazás+ Kiállítást és a Budapest Boat Show-t
2024.02.28. - 19:08
Meteorológia: szombaton is megdőlt több melegrekord
2024.02.12. - 11:01
Átadták a magyar tudomány kategóriában az idei Junior Prima Díjakat
2023.11.29. - 15:35
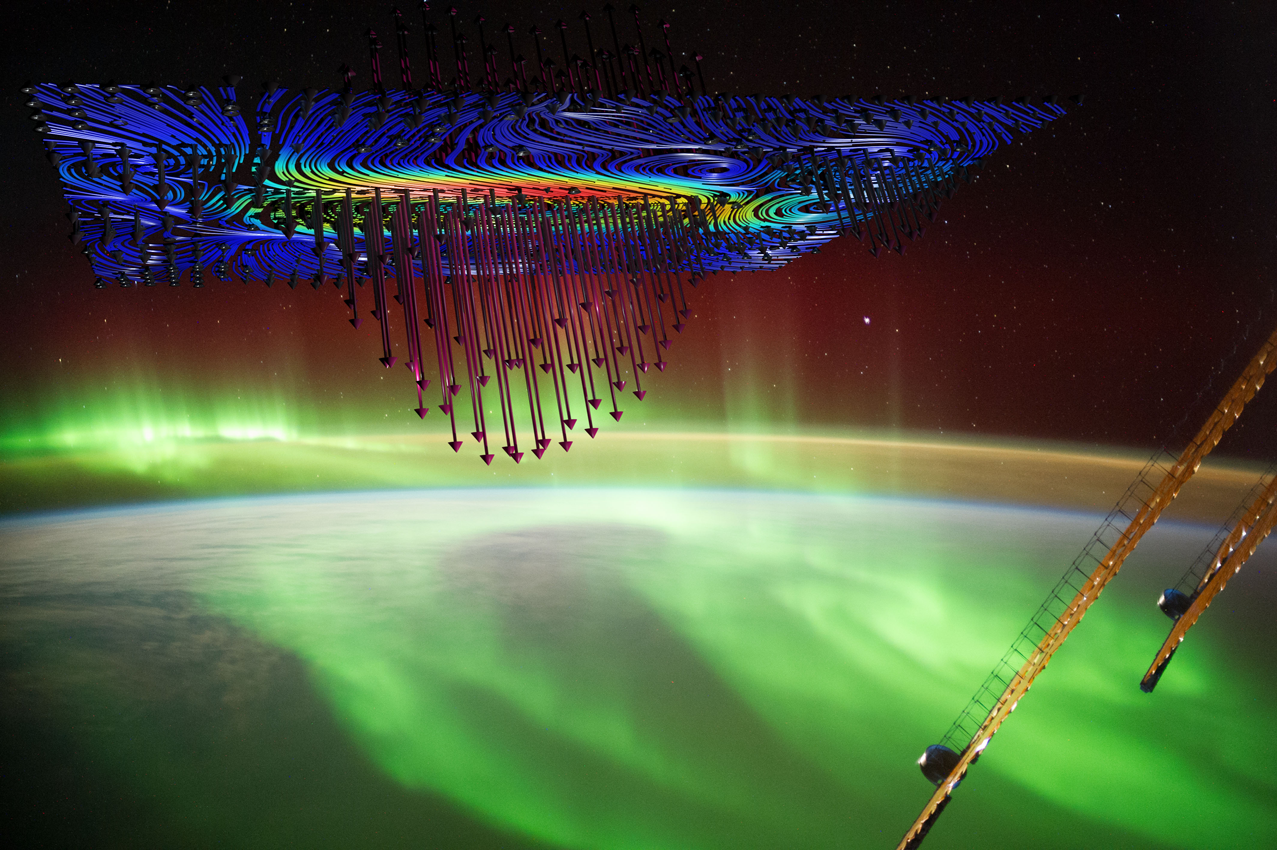
A napfolttól a sarki fényig – a Földfizikai és Űrtudományi Kutatóintézet a hazai űridőjárás megfigyelés szolgálatában
2023.11.28. - 17:35
KÖRNYEZETVÉDELEM
Kiállítás nyílik a II. kerület közösségi szemétszedésén összegyűlt hulladékokból
2024.04.24. - 10:34
Jó hírt jelentett be a kormány annak, aki napelemet telepített pályázattal
2024.04.24. - 05:33
Idén is visszagyűjti a feleslegessé vált mobiltelefonokat az Auchan
2024.04.23. - 19:08
Kék bolygó – A zöldátálláshoz egyes nyersanyagokból bizonyos mértékig fedezhető a szükséglet Magyarországon
2024.04.23. - 18:09
MEGÚJULÓ ENERGIAFORRÁSOK
EM: már több mint 5000 nyertes a Napenergia Plusz programban
2024.04.24. - 17:08
Az év végig megkétszerezi napenergia-termelő kapacitásait a Budapesti Közművek
2024.04.20. - 11:34
Napelempark épül a debreceni BMW autógyár területén
2024.04.12. - 14:34
Átadták Románia legnagyobb villanyáram-tároló akkumulátortelepét
2024.04.10. - 18:38
ZÖLD ÉPÍTÉSZET
Átadták az energetikailag korszerűsített vármegyeházát Kaposváron pénteken
2022.11.07. - 17:04
Latorcai: 71 milliárd forintot biztosít a kormány települési zöldinfrastruktúrák kialakítására
2022.10.22. - 18:34
Fejlesztik a vízpótló és víztározási lehetőségeket az Alföldön
2022.10.05. - 15:04
Folytatódik Fegyverneken a csapadékvíz-elvezető hálózat építése
2022.10.04. - 13:04
TECHNIKA
Az EP a mesterséges intelligenciáról szóló jogszabályt fogadott el
2024.03.15. - 18:34
SZEppelin: országos sikert aratott a Széchenyi-egyetem hallgatói csapata a távközlési versenyen
2024.02.27. - 13:34
Mesterséges intelligenciát alkalmaz a Széchenyi István Egyetemen fejlesztett mezőgazdasági robot
2024.02.21. - 20:08
Újra megdöntené saját világrekordját a Széchenyi István Egyetem sikercsapata
2024.01.05. - 15:07
Minden jog fenntartva! ©2020 Tisztajövő